
Humanoid's KinetIQ is a unified AI framework that runs across multiple robot bodies at once. It works on both wheeled and bipedal platforms, whatever hardware it's deployed on. By moving beyond hard-coded scripts, Humanoid has established one model and shared learning across different physical forms. According to Humanoid, it's the end of the data silo: experience collected on one robot body contributes to every other.
Here's five things worth understanding about how it works and what that actually means in practice.
Takeaway 1: The "Cross-Embodiment" Breakthrough
In traditional robotics, a wheeled robot and a bipedal robot were treated as entirely different species, each requiring its own bespoke software. KinetIQ changes that with cross-embodiment capabilities. A single AI model now controls robots with radically different morphologies - from the Alpha Wheeled platform, optimised for back-of-store grocery picking and logistics, to the Alpha Bipedal model, engineered for the nuanced adaptability required in home service.
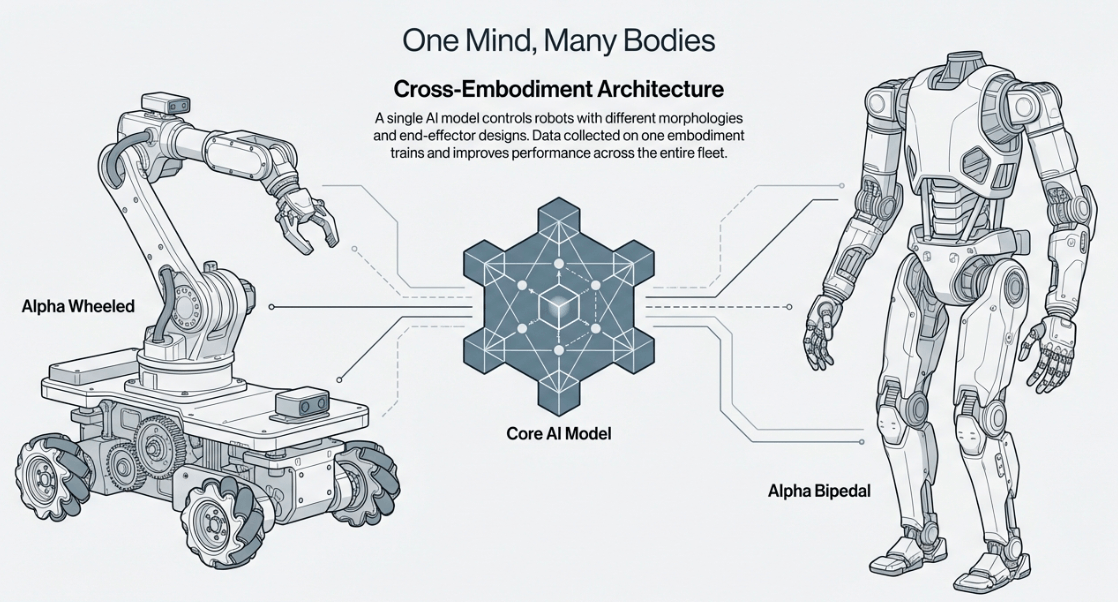
Cross-Embodiment-Breakthrough
Analysis: Because data collected on one embodiment helps train the others, every hour a wheeled robot spends moving containers in a retail warehouse contributes to the intelligence of a bipedal assistant in a home. Nothing learned on one platform gets thrown away when the hardware changes. That's what makes the shared model commercially interesting. The training data compounds across the whole fleet, regardless of the hardware it was trained on.
Takeaway 2: A Four-Layered Concept of Time
The KinetIQ architecture is cross-timescale, managing four distinct cognitive layers that operate simultaneously at different frequencies. Crucially, the system follows an agentic pattern where each layer treats the layer below it as a set of tools, prompting them to achieve higher-level goals.
System 3 (Fleet-Level Orchestration):
Operates on a timescale of seconds. It integrates directly with facility management systems to assign tasks, coordinate robot swaps at workstations, and maximize throughput.
System 2 (Robot-Level Reasoning):
Spans seconds to sub-minutes, decomposing fleet goals into specific environmental interactions.
System 1 (Low-Level Execution):
Operates at 5–10Hz, commanding specific body parts to perform tasks like picking, placing, or locomoting.
System 0 (Whole-Body Control):
The "reflex" layer, running at 50Hz to ensure dynamic stability.
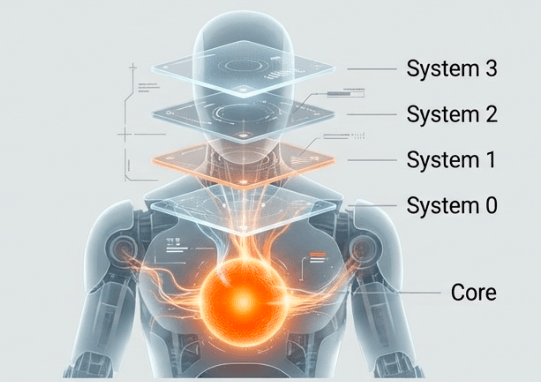
A Four-Layered Concept of Time
Analysis: While System 3 is concerned with logistics and facility-wide uptime, System 0 is calculating the torque required for stability in milliseconds. System 0 is trained solely in simulation. Humanoid says it requires roughly 15,000 hours of reinforcement learning experience to produce a model capable of nearly any movement before it ever touches a physical floor.
Takeaway 3: Robots as Agentic Problem Solvers (System 2)
At the reasoning layer, KinetIQ utilizes an omni-modal language model to observe the environment and interpret high-level instructions. Unlike old-school robots that fail when a box is turned the wrong way, a KinetIQ-powered robot uses visual context to update its plan dynamically.
Analysis: When a robot identifies a more efficient way to navigate a cluttered aisle or pack a non-standard container, that successful plan can be saved as a new Standard Operating Procedure (SOP). These SOPs are then shared across the entire fleet. Imagine a solution found by a single robot in a Tokyo warehouse being instantly available to a robot in London. That is the power of shared agentic learning.
Takeaway 4: The Intelligence to Ask for Help
Robot "stubbornness" is a real problem in the industry. When a machine fails, it continues to repeat the error. KinetIQ introduces a feedback loop where System 2 monitors the progress of System 1. If the robot-level agent determines it cannot complete a task, it flags the exception and requests human intervention through the fleet layer.
Assistance is delivered through a high-precision human-in-the-loop mechanism:
- Prompting: A human provides new high-level guidance to the System 2 reasoning agent.
- Teleoperation: A human takes direct control of the joints at the System 1 level for complex, non-standard manipulations.
Analysis: With KinetIQ, a single stuck robot doesn't shut down an entire workflow. A human can “unstick” it via a quick prompt or remote session and the line keeps moving. The robot asks for help; the human provides it; everything continues. That's what makes the system not just viable at commercial scale, but safe enough to deploy alongside people.
Takeaway 5: Solving the "Reality Gap" with Prefix Conditioning
To bridge the gap between high-level "thoughts" and physical execution, System 1 uses a Vision-Language-Action (VLA) neural network. However, in asynchronous systems, the "reality" the robot predicted a split-second ago might change by the time the action is executed. To solve this, Humanoid uses prefix conditioning. Think of it like a person starting to speak the next sentence while still finishing the current one; to ensure the speech is fluid and logical, the second half of the thought must be conditioned on exactly what has already left the speaker's mouth. In KinetIQ, every new chunk of action is conditioned on the part of the previous chunk currently being executed.
Analysis: This ensures that the robot’s actions never contradict the unfolding reality of the physical world. Because this technique works regardless of the underlying model architecture, KinetIQ isn't locked into today's AI. This means that KinetIQ can absorb the next generation of AI models without a total architectural overhaul.
Watch the official video by Humanoid
Conclusion: The Road to Physical AI
KinetIQ is a coherent architecture on paper. The four-layer design is logical, the cross-embodiment idea is genuinely interesting, and prefix conditioning is a real technical solution to a real problem. What it isn't yet is proven. Humanoid hasn't published deployment results, and the gap between a well-designed framework and one that works reliably in a messy warehouse is where most robotics companies have stumbled. Worth watching. Not worth believing yet.